راهنمای جامع محاسبه نسبت تبدیل و گشتاور ورودی/خروجی در گیربکس

آیا تا به حال به این فکر کردهاید که چگونه یک موتور الکتریکی کوچک میتواند نیروی لازم برای جابجایی یک نوار نقاله چند تنی را فراهم کند؟ یا چگونه دستگاههای عظیم صنعتی با وجود الکتروموتورهایی با توان محدود، قادر به خرد کردن سنگهای معدنی یا جابجایی کانتینرهای سنگین هستند؟ راز این قدرت خیرهکننده در قلب سیستمهای انتقال قدرت، یعنی دستگاهی به نام گیربکس نهفته است.
بسیاری از خریداران تجهیزات صنعتی و حتی تکنسینهای تازهکار، هنگام طراحی یک سیستم یا خرید قطعات جایگزین، تنها به «توان موتور» توجه میکنند. اما توان موتور به تنهایی هیچ مشکلی را حل نمیکند؛ آنچه باعث به حرکت درآوردن بارها و غلبه بر مقاومتها میشود، مدیریت صحیح سرعت و قدرت است. این مدیریت از طریق دو پارامتر بسیار حیاتی به نام «نسبت تبدیل» و «گشتاور» انجام میپذیرد. عدم آگاهی از نحوه محاسبه این دو فاکتور، به راحتی میتواند به سوختن موتور، خرد شدن چرخدندهها و توقف کامل خط تولید منجر شود.
در این مقاله تخصصی و در عین حال ساده و کاربردی، قصد داریم به دور از پیچیدگیهای گیجکننده دانشگاهی، به شما آموزش دهیم که چگونه مانند یک مهندس طراح، نسبت تبدیل و گشتاور ورودی و خروجی سیستم خود را محاسبه کنید. پس از مطالعه این راهنما، شما قادر خواهید بود با دیدی کاملاً باز و حرفهای، بهترین گیربکس را برای نیاز صنعتی یا کارگاهی خود انتخاب نمایید.
گیربکس چیست و چرا در صنعت به آن نیاز داریم؟
گیربکس (Gearbox) یا جعبهدنده، یک واسطه مکانیکی بین منبع تولید توان (مانند الکتروموتور، موتور دیزل یا توربین) و دستگاه مصرفکننده توان (مانند پمپ، میکسر یا چرخهای یک خودرو) است. در یک تعریف بسیار ساده، الکتروموتورها معمولاً با سرعت دورانی بسیار بالا و قدرت چرخش (گشتاور) پایین کار میکنند. اگر این موتور را مستقیماً به یک دستگاه سنگین متصل کنیم، موتور توان چرخاندن آن را نخواهد داشت و بلافاصله میسوزد.
گیربکس با استفاده از مجموعهای از چرخدندهها با ابعاد مختلف، این مشکل را حل میکند. وظیفه اصلی گیربکس در بیشتر صنایع، کاهش سرعت چرخش موتور و تبدیل آن به یک قدرت چرخشی عظیم در خروجی است. به این نوع گیربکسها، «گیربکس کاهنده» گفته میشود. البته در موارد خاصی برای افزایش سرعت نیز از گیربکس استفاده میشود که به آنها «افزاینده» میگویند، اما تمرکز اصلی ما در این مقاله بر روی پرکاربردترین نوع، یعنی گیربکسهای کاهنده است.

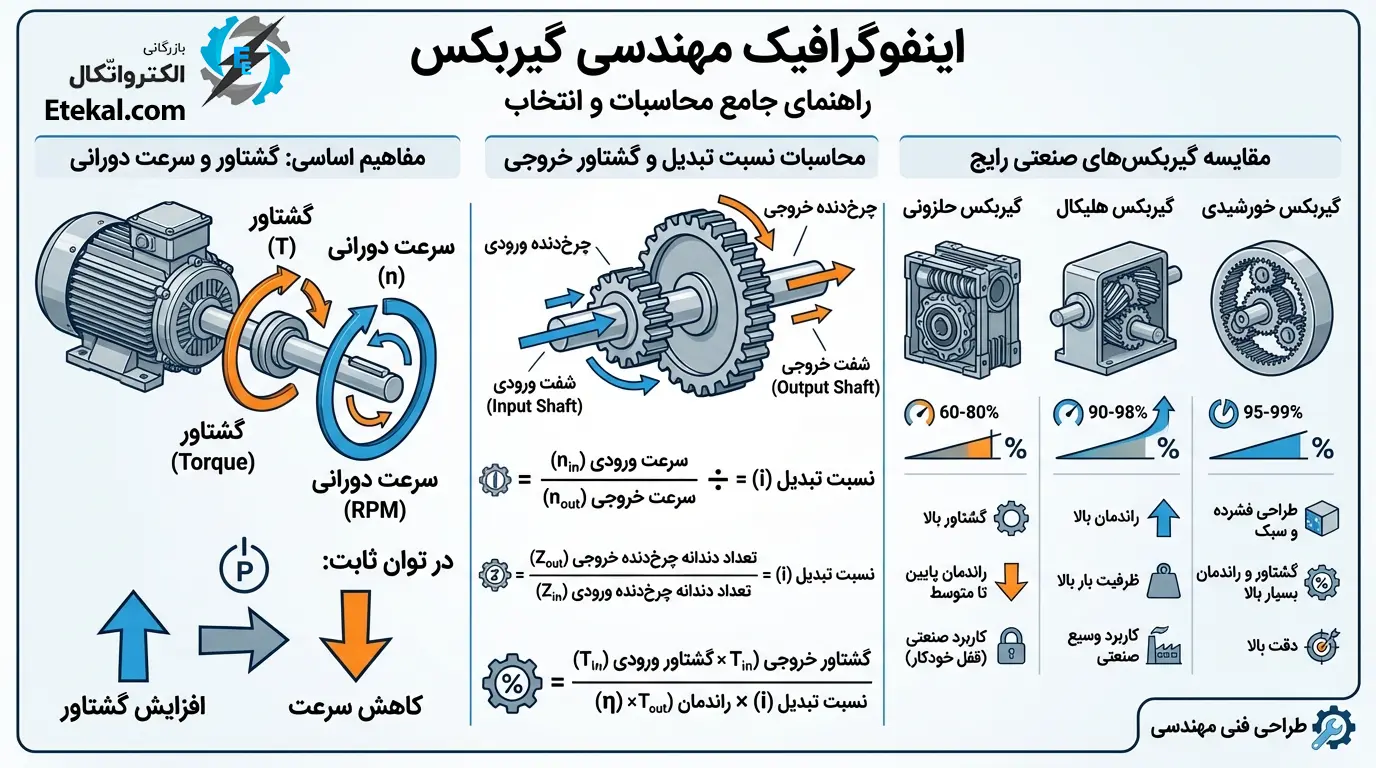
مفاهیم پایه: گشتاور و دور موتور به چه معنا هستند؟
برای درک نحوه کار گیربکس، ابتدا باید با دو مفهوم کلیدی فیزیک در حرکت دورانی آشنا شویم. بدون درک این دو مفهوم، محاسبه مشخصات گیربکس غیرممکن است.
دور موتور یا سرعت دورانی (RPM)
سرعت دورانی نشان میدهد که شفت (محور) موتور یا گیربکس در هر یک دقیقه، چند دور کامل میچرخد. واحد استاندارد اندازهگیری آن در صنعت، دور بر دقیقه یا RPM (Revolutions Per Minute) است. به عنوان مثال، یک الکتروموتور استاندارد معمولاً سرعتی معادل ۱۴۰۰ یا ۳۰۰۰ دور بر دقیقه دارد.
گشتاور (Torque)
اگر بخواهیم گشتاور را به سادهترین شکل ممکن تعریف کنیم، باید بگوییم: «گشتاور همان زور یا قدرت پیچاندن است». وقتی با یک آچار، پیچی را سفت میکنید، در حال وارد کردن گشتاور به آن پیچ هستید. هرچه دسته آچار بلندتر باشد یا نیروی بیشتری وارد کنید، گشتاور بیشتر میشود.
در سیستمهای دوار، گشتاور نشاندهنده توانایی شفت برای غلبه بر مقاومت دستگاه و چرخاندن آن است. واحد استاندارد گشتاور در سیستم متریک، نیوتنمتر (N.m) است. فرمول پایه گشتاور به شکل زیر است:
در این فرمول:
- T: گشتاور
- F: نیروی وارد شده
- r: شعاع یا فاصله از مرکز چرخش
در سیستمهای انتقال قدرت، رابطه بین سرعت و گشتاور یک رابطه الاکلنگی است (با فرض ثابت بودن توان موتور). یعنی اگر با استفاده از گیربکس سرعت را کم کنیم، گشتاور به همان نسبت افزایش مییابد و برعکس.
نسبت تبدیل در گیربکس (Gear Ratio) چیست؟
مهمترین مشخصه هر گیربکسی، «نسبت تبدیل» آن است که با حرف اختصاری i نمایش داده میشود. نسبت تبدیل به ما میگوید که گیربکس دقیقاً چه تغییری در سرعت ورودی ایجاد میکند. این عدد نشاندهنده نسبت بین سرعت چرخش شفت ورودی (متصل به موتور) به سرعت چرخش شفت خروجی (متصل به دستگاه) است.
فرمول محاسبه نسبت تبدیل گیربکس
برای محاسبه نسبت تبدیل، دو روش اصلی وجود دارد. روش اول بر اساس سرعت دوران (دور بر دقیقه) است:
Nout
در این فرمول:
- i: نسبت تبدیل (بدون واحد)
- Nin: سرعت شفت ورودی (سرعت الکتروموتور) بر حسب RPM
- Nout: سرعت شفت خروجی گیربکس بر حسب RPM
مثال کاربردی: فرض کنید یک موتور با سرعت ۱۴۰۰ دور بر دقیقه دارید و دستگاه شما برای کار کردن به سرعت ۷۰ دور بر دقیقه نیاز دارد. نسبت تبدیل گیربکس مورد نیاز شما چقدر است؟
پاسخ: با قرار دادن اعداد در فرمول، i = 1400 ÷ 70 = 20. بنابراین شما به یک گیربکس با نسبت تبدیل ۱ به ۲۰ (معمولاً به صورت 1:20 نوشته میشود) نیاز دارید. این یعنی شفت موتور باید ۲۰ دور بچرخد تا شفت خروجی گیربکس تنها ۱ دور بزند.
روش دوم محاسبه نسبت تبدیل در زمان طراحی چرخدندهها کاربرد دارد و بر اساس تعداد دندانههای چرخدندهها محاسبه میشود:
Zin
در اینجا Zout تعداد دندانههای چرخدنده متحرک (خروجی) و Zin تعداد دندانههای چرخدنده محرک (ورودی) است.
نحوه محاسبه گشتاور ورودی و خروجی گیربکس (فرمولهای طلایی)
اکنون به مهمترین بخش ماجرا میرسیم؛ چگونه بفهمیم گیربکس ما چقدر قدرت (گشتاور) تولید میکند؟ برای این کار باید محاسبات را در دو مرحله انجام دهیم.
مرحله اول: محاسبه گشتاور ورودی (گشتاور تولیدی موتور)
ابتدا باید بدانیم موتوری که به گیربکس متصل شده است، دقیقاً چه مقدار زور یا گشتاور را وارد شفت گیربکس میکند. برای این محاسبه، از توان موتور و سرعت آن استفاده میکنیم. فرمول طلایی و استاندارد مهندسی برای محاسبه گشتاور الکتروموتور به شرح زیر است:
Nin
در این فرمول مهندسی:
- Tin: گشتاور ورودی به دست آمده بر حسب نیوتنمتر (N.m)
- P: توان الکتروموتور بر حسب کیلووات (kW)
- Nin: دور موتور در دقیقه (RPM)
- 9550: یک ثابت تبدیل واحد استاندارد برای رسیدن از کیلووات و RPM به نیوتنمتر است.
مثال: فرض کنید یک الکتروموتور ۳ کیلووات با سرعت ۱۴۰۰ دور بر دقیقه داریم. گشتاور تولیدی این موتور چقدر است؟
1400
≈ 20.46 N.m
یعنی این موتور به تنهایی حدود ۲۰.۴۶ نیوتنمتر قدرت پیچشی دارد.
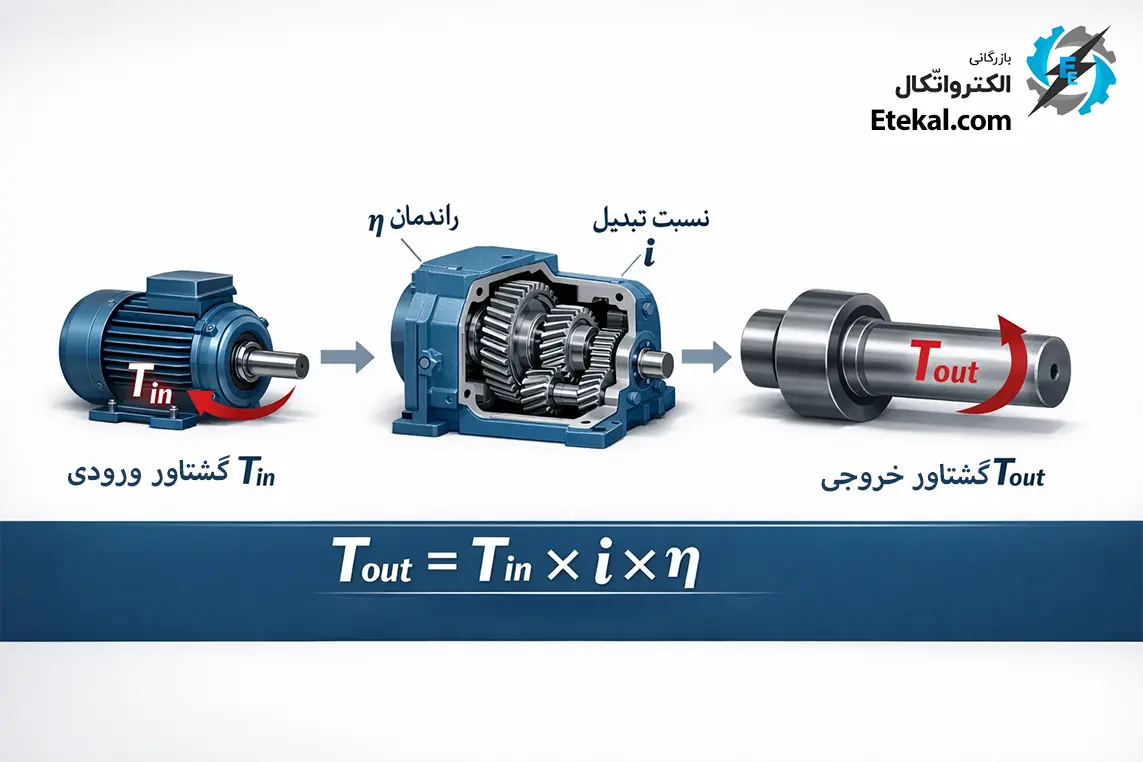
مرحله دوم: محاسبه گشتاور خروجی گیربکس
حالا این موتور با گشتاور ۲۰.۴۶ نیوتنمتر به گیربکسی با نسبت تبدیل i = 20 متصل میشود. در یک دنیای کاملاً ایدهآل و بدون اصطکاک، گشتاور خروجی دقیقاً برابر با ضرب گشتاور ورودی در نسبت تبدیل است. اما در دنیای واقعی، چرخش چرخدندهها درون هم و اصطکاک یاتاقانها باعث تولید گرما و هدررفت بخشی از توان میشود. این هدررفت با پارامتری به نام «راندمان» (Efficiency) که با علامت η نشان داده میشود، محاسبه میگردد.
فرمول محاسبه گشتاور خروجی واقعی گیربکس به این صورت است:
در این فرمول:
- Tout: گشتاور خروجی نهایی (N.m)
- Tin: گشتاور ورودی (N.m)
- i: نسبت تبدیل
- η: راندمان گیربکس (به صورت اعشاری وارد میشود، مثلاً برای راندمان ۸۵ درصد عدد ۰.۸۵ را قرار میدهیم).
ادامه مثال قبلی: اگر راندمان گیربکس ما ۸۵٪ باشد، گشتاور خروجی نهایی چقدر خواهد بود؟
همانطور که میبینید، گیربکس توانست قدرت چرخشی موتور را از حدود ۲۰ نیوتنمتر به نزدیک ۳۴۸ نیوتنمتر افزایش دهد تا توانایی چرخاندن بارهای بسیار سنگین فراهم شود.
معرفی انواع گیربکس صنعتی و تاثیر آنها بر گشتاور و راندمان
راندمانی که در فرمول بالا به آن اشاره کردیم (η)، کاملاً به نوع و مکانیزم داخلی گیربکس بستگی دارد. شناخت انواع گیربکس به شما کمک میکند درک کنید چرا در برخی موارد گشتاور خروجی کمتر از حد انتظار شماست.
۱. گیربکسهای حلزونی (Worm Gearbox)
این گیربکسها دارای یک ماردون (مارپیچ) و یک چرخدنده برنجی هستند. زاویه انتقال قدرت در آنها ۹۰ درجه است.
- مزایا: قیمت مناسب، ابعاد جمعوجور، نسبت تبدیل بسیار بالا در یک مرحله، قابلیت خودقفلشوندگی.
- معایب: به دلیل سطح تماس لغزشی بالا، اصطکاک زیادی دارند. راندمان آنها پایین است (معمولاً بین ۵۰ تا ۸۰ درصد). در این نوع گیربکسها بخش قابل توجهی از گشتاور به دلیل راندمان پایین از دست میرود.
۲. گیربکسهای هلیکال یا شافت مستقیم (Helical Gearbox)
در این نوع، چرخدندهها دارای دندانههای مورب هستند که درگیری نرم و پیوستهای را ایجاد میکنند.
- مزایا: انتقال قدرت بسیار نرم و کمصدا، تحمل بار بالا، و راندمان بسیار عالی (معمولاً بین ۹۰ تا ۹۸ درصد).
- کاربرد: برای دستگاههایی که به صورت مداوم کار میکنند و نیاز به انتقال حداکثر گشتاور بدون اتلاف انرژی دارند.
۳. گیربکسهای خورشیدی یا سیارهای (Planetary Gearbox)
مکانیزم این گیربکسها شامل یک دنده مرکزی، چند دنده سیارهای در اطراف و یک دنده رینگی محیطی است.
- مزایا: بالاترین میزان انتقال گشتاور نسبت به حجم، تحمل شوکهای ناگهانی بسیار بالا، راندمان عالی (بالای ۹۵ درصد).
- کاربرد: ماشینآلات سنگین، توربینهای بادی و دستگاههایی که فضای کم اما نیاز به گشتاور غولآسایی دارند.
کاربرد محاسبه گشتاور و نسبت تبدیل در دنیای واقعی و صنعت
- نوار نقالهها (Conveyors): محاسبه گشتاور مورد نیاز برای چرخش غلتک و سرعت مورد نیاز نوار جهت انتخاب نسبت تبدیل و الکتروموتور مناسب.
- میکسرها و همزنهای صنعتی: محاسبه گشتاور خروجی تضمین میکند که پرههای میکسر درون مواد گیر نکنند و الکتروموتور دچار سوختگی نشود.
- جرثقیلها و بالابرها: گشتاور خروجی باید قادر به غلبه بر نیروی جاذبه باشد. محاسبه دقیق شرط اصلی جلوگیری از سقوط بار است.
راهنمای گامبهگام انتخاب گیربکس برای خریداران غیرمتخصص
- گام اول: دور خروجی مورد نیاز را مشخص کنید. با داشتن دور موتور و دور خروجی، نسبت تبدیل مورد نیاز شما به دست میآید.
- گام دوم: گشتاور مورد نیاز دستگاه را محاسبه کنید. دستگاه برای به حرکت درآوردن بار به چه مقدار نیرو نیاز دارد؟
- گام سوم: ضریب اطمینان (Service Factor) را اعمال کنید. هیچگاه گیربکسی را دقیقاً مماس با گشتاور مورد نیاز خود نخرید. گشتاور مورد نیاز را در ضریب کاربری (بین ۱.۲ تا ۲.۵) ضرب کنید.
- گام چهارم: به کاتالوگ شرکت سازنده مراجعه کنید. با داشتن نسبت تبدیل و گشتاور نهایی، مدلی را انتخاب کنید که این مشخصات را پوشش میدهد.
اشتباهات رایج در انتخاب و محاسبه مشخصات گیربکس
- نادیده گرفتن راندمان در محاسبات: استفاده از فرمول Tout = Tin × i بدون در نظر گرفتن هدررفت انرژی (η).
- اشتباه گرفتن توان با گشتاور: خرید صرفاً بر اساس توان (اسب بخار). موتور ۵.۵ اسب با دور ۳۰۰۰ گشتاور متفاوتی نسبت به موتور ۵.۵ اسب با دور ۹۰۰ تولید میکند.
- بیتوجهی به بارهای شعاعی و محوری: علاوه بر گشتاور پیچشی، شفت گیربکس متحمل بارهای ناشی از وزن زنجیر یا پولی متصل به آن میشود.
نکات مهم نگهداری برای حفظ گشتاور و راندمان گیربکس
- روغنکاری استاندارد و منظم: کاهش سطح روغن باعث افزایش شدید اصطکاک و کاهش راندمان میشود.
- همراستایی (Alignment) دقیق: عدم همراستایی باعث لرزش شدید، اتلاف گشتاور و در نهایت بریدن شفت میشود.
- کنترل دمای بدنه: حرارت غیرطبیعی نشانه درگیری نادرست دندهها یا اضافهبار (Overload) روی سیستم است.
جمعبندی نهایی و توصیه کاربردی
سیستمهای انتقال قدرت قلب تپنده صنایع هستند. پارامترهای قدرت یک موتور الکتریکی بدون استفاده از گیربکسِ مناسب، برای کاربردهای صنعتی بیفایده است. محاسبه نسبت تبدیل از طریق تقسیم دور موتور بر دور خروجی، و محاسبه گشتاور از طریق فرمولهای توان و راندمان، به شما کمک میکند تا دقیقا بدانید چه مقدار نیرو به مصرفکننده نهایی میرسد.
توصیه کاربردی ما این است: پیش از خرید تجهیزات، سه عامل «توان موتور»، «دور خروجی مورد نیاز دستگاه» و «راندمان نوع گیربکس انتخابی» را مکتوب کنید. با استفاده از فرمولهای ارائهشده، گشتاور واقعی خروجی را به دست آورید و حتماً ضریب اطمینان (Service Factor) را لحاظ کنید.
سوالات متداول (FAQ)
۱. نسبت تبدیل گیربکس چیست و چگونه محاسبه میشود؟
نسبت تبدیل، نشاندهنده میزان کاهش یا افزایش دور موتور توسط گیربکس است و از تقسیم دور شفت ورودی (موتور) بر دور شفت خروجی گیربکس به دست میآید.
۲. واحد اندازهگیری گشتاور چیست و به چه معناست؟
گشتاور با واحد استاندارد نیوتنمتر (N.m) اندازهگیری میشود و بیانگر قدرت یا زوری است که شفت خروجی برای پیچاندن و چرخاندن بار یا دستگاه مصرفکننده اعمال میکند.
۳. آیا گشتاور خروجی گیربکس همیشه با ضرب نسبت تبدیل در گشتاور ورودی برابر است؟
خیر، در شرایط واقعی هیچگاه این دو برابر نیستند. به دلیل وجود اصطکاک، باید پارامتر «راندمان گیربکس» (η) را نیز در این فرمول ضرب کنید تا گشتاور واقعی و نهایی محاسبه شود.
۴. راندمان کدام گیربکسها کمتر و کدام بیشتر است؟
گیربکسهای حلزونی به دلیل ساختار لغزشی مارپیچ، کمترین راندمان (حدود ۵۰ تا ۸۰ درصد) را دارند. در مقابل، گیربکسهای خورشیدی و هلیکال دارای بالاترین میزان راندمان (بیش از ۹۰ درصد) هستند.
۵. ضریب اطمینان (Service Factor) در محاسبه گشتاور چه نقشی دارد؟
ضریب اطمینان عددی است که در گشتاور محاسبه شده ضرب میشود تا گیربکس انتخابی، توانایی تحمل شوکهای ناگهانی، راهاندازیهای مکرر و کارکرد مداوم را بدون آسیبدیدگی داشته باشد.